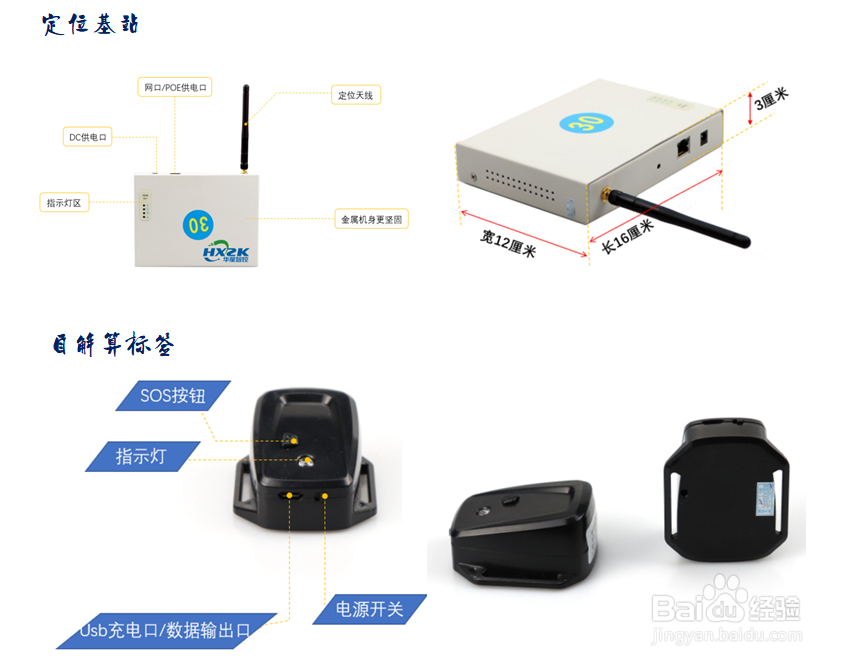
1、第1步 在需要定位机器人的空间内如下图所示安装上定位基站,定位基站安装高度尽量不低于3米,然后给定位基站供上电。

2、第2步 如下图所示安装好定位基站后,需要确定一个直角坐标系,这个坐标系是自己定义的,定义一个XYZ轴。然后需要测量出每个基站所在坐标系的X,Y,Z坐标,记录下来备用。

3、第3步 在机器人身上安装上华星智控自解算定位标签,标签的MICRO-UWB口和机器人的处理服务器连接,这样标签就可以通过串口将实时的位置数据给到机器人用了。

4、第4步 接下来我们需要将每个定位基站对应的ID号和坐标输入到定位标签中,打开串口调试工具 SecureCRT软件,将每个基站的坐标输入标签即可。完成以上步骤就可以实现的机器人的10厘米级实时定位了。


