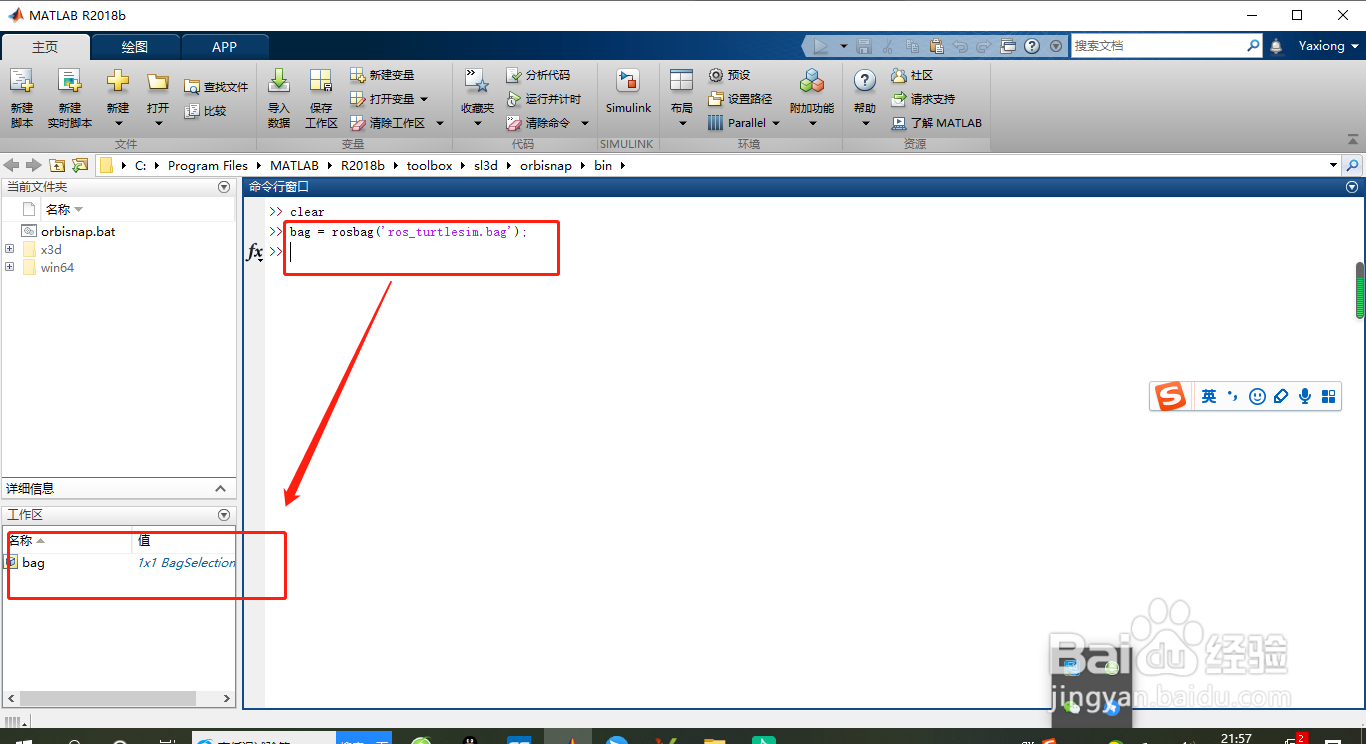
1、命令行键入:bag = rosbag('ros_turtlesim.bag');
%加载rosbag。
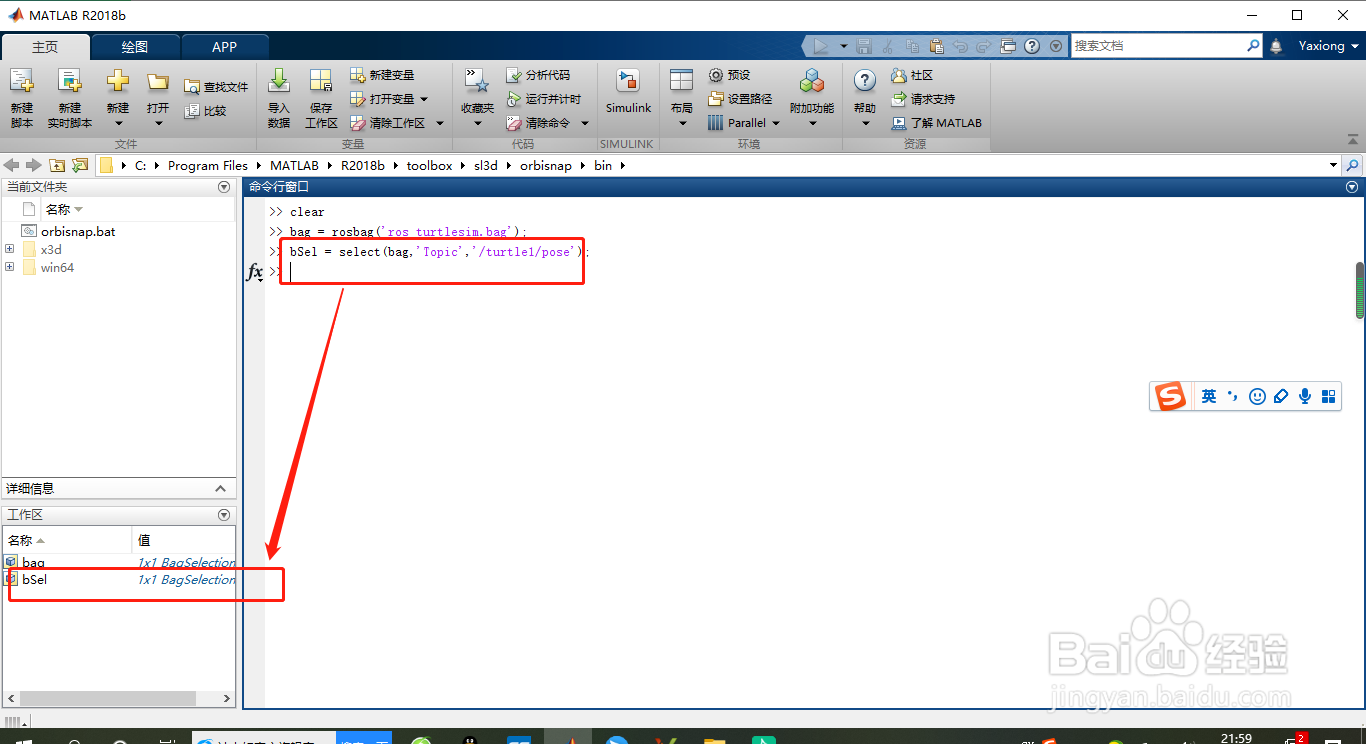
2、命令行键入:bSel = select(bag,'Topic','/turtle1/pose');
%选择一个特定的主题。
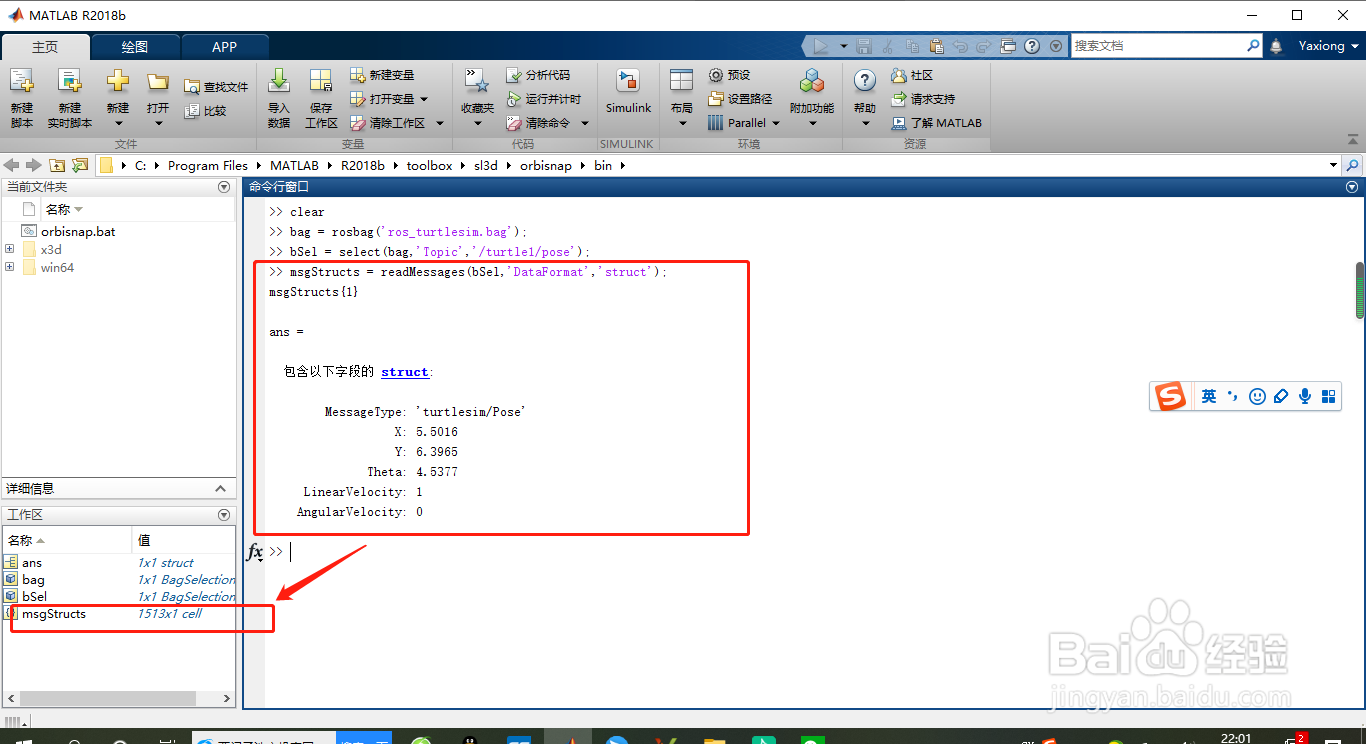
3、命令行键入:
msgStructs = readMessages(bSel,'DataFormat','struct');
msgStructs{1}
%将消息作为结构读取。在读取消息时指定DataFormat名称-值对。检查返回的结构单元数组中的第一个结构。
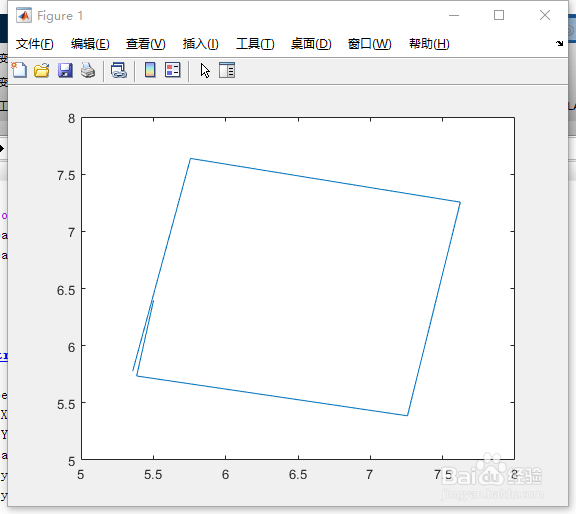
4、从消息中提取xy点并绘制机器人轨迹。
5、命令行键入:
xPoints = cellfun(@(m) double(m.X),msgStructs);
yPoints = cellfun(@(m) double(m.Y),msgStructs);
plot(xPoints,yPoints)
%使用cellfun从结构中提取所有的X和Y字段。这些字段表示机器人在rosbag记录期间的xy位置。